
Table des matières
Le hack des Go Pro Hero 2
Câble de synchronisation des GoPro
Retour à la page principale → Open Path View
Problématique
Nous devons pouvoir lancé la prise de vue sur tout les appareil en “même temps” bien sûr il est impossible de le faire exactement au même moment mais nous devons limiter le décalage entre 2 prises de vues.
Solution
GoPro a sorti un kit 3D, dans lequel on trouve 2 petits boîtiers rouges. Ces boîtiers sont la clé pour synchroniser 2 appareils.
La communauté d'utilisateurs GoPro a examiné de très près le fonctionnement de ces boîtiers pour l'étendre a plus de 2 appareils. Pour cela nous allons tenté de réunir les infos présentes ici.
Nous allons donc reproduire le circuit.
Ressources
Matériel pour les tests
- Connecteurs “ipod” (30 pins), pour les tests on prendra 2 PodBreakout
- 2 supports dip 8
- des cables :)
- Nous utlisons des EEPROM CMS. Le datasheet est disponible à cette adresse : http://ww1.microchip.com/downloads/en/DeviceDoc/21711J.pdf
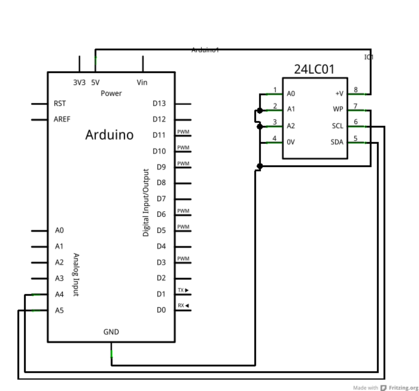
Préparation de l'EEPROM
#if defined(ARDUINO) && ARDUINO >= 100 #include "Arduino.h" #else #include "WProgram.h" #endif #include <Wire.h> #define ADDRESS 0x50 void setup() { Wire.begin(); /* Serial output */ Serial.begin(9600); delay(5000); Serial.println("Dumping eeprom first 8 bytes"); dump(); Serial.println("Writing to first byte"); Wire.beginTransmission(ADDRESS); Wire.write(0); Wire.write((byte)0x05); Wire.endTransmission(); Serial.println("Dumping eeprom first 8 bytes"); dump(); Serial.println("Done"); } void loop() { } void dump() { Wire.beginTransmission(ADDRESS); Wire.write(0); Wire.endTransmission(); Wire.beginTransmission(ADDRESS); Wire.write(0); Wire.endTransmission(); Wire.beginTransmission(ADDRESS); Wire.requestFrom(ADDRESS, 8); while(Wire.available() < 8) {}; for (int j=0; j < 8; j++) { printInt(Wire.read()); Serial.print(" "); } Serial.println(); Wire.endTransmission(); } void printInt(int i) { Serial.print("0x"); if ( i<16 ) Serial.print("0"); Serial.print(i, HEX); }
 Le montage correspondant :
Le montage correspondant :
Sources
Hack GoPro Hero 2 : http://mikenz.geek.nz/blog/gopro-hd-hero2-arduino/
La GoPro fonctionnant en 3,3v, il faut éviter d'utiliser une tension de 5v, afin d'éviter l'utilisation d'un convertisseur nous utilisons un Arduino Pro Mini 3,3 v.
Contrôle d'une GoPro par un Arduino
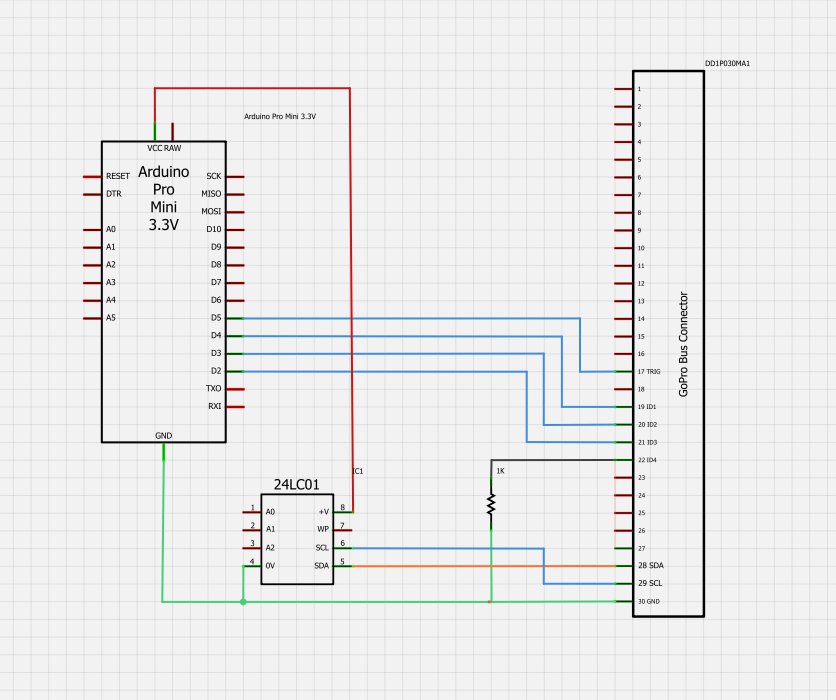
Code Arduino contrôlant 6 GoPro
//GoPro Arduino control #define GOPRO_TRIG 2 #define GOPRO_ID1 {7,8,9,10,11,12} #define GOPRO_ID2 3 #define GOPRO_ID3 4 #define POW_MOD_1 13 #define POW_MOD_2 6 #define TIME_OUT 2000 void GoPro_powerOn(){ //turn GoPro on digitalWrite(POW_MOD_1, LOW); digitalWrite(POW_MOD_2, LOW); delay(350); digitalWrite(POW_MOD_1, HIGH); digitalWrite(POW_MOD_2, HIGH); delay(4500); //Booting time Serial.println("ON"); } void GoPro_setMode(){ //turn GoPro in photo mode digitalWrite(POW_MOD_1, LOW); digitalWrite(POW_MOD_2, LOW); delay(350); digitalWrite(POW_MOD_1, HIGH); digitalWrite(POW_MOD_2, HIGH); delay(350); //Security time Serial.println("PHOTO_MODE"); } void GoPro_powerOff(){ //turn GoPro off digitalWrite(POW_MOD_1, LOW); digitalWrite(POW_MOD_2, LOW); delay(3000); digitalWrite(POW_MOD_1, HIGH); digitalWrite(POW_MOD_2, HIGH); Serial.println("OFF"); } void GoPro_takePic(){ //take picture int pinList[] = GOPRO_ID1; //get the pin list int start_n[6]; //list of pin initial stat for (int i = 0;i<6;i++){ start_n[i] = digitalRead(pinList[i]); } digitalWrite(GOPRO_ID2, LOW); delayMicroseconds(340); digitalWrite(GOPRO_ID2, HIGH); Serial.println("ID2"); unsigned long time = millis(); bool notOkList[6]; int notOk = 1; //check if all statu are differente == ready while (notOk==1){ notOk = 0; for (int i = 0;i<6;i++){ if(digitalRead(pinList[i]) == start_n[i]){ notOk = 1; notOkList[i]=1; } else{ notOkList[i]=0; } if( (millis()-time)>=TIME_OUT){ Serial.println("ERROR"); for (int i = 0;i<6;i++){Serial.print(notOkList[i]);} Serial.println(""); notOk = -1; break; } } } Serial.println("ID1s"); digitalWrite(GOPRO_TRIG, LOW); //take pic delayMicroseconds(340); digitalWrite(GOPRO_TRIG, HIGH); Serial.println("TAKEN"); } void setup() { // Serial output // Serial.begin(38400); pinMode(POW_MOD_1, OUTPUT); digitalWrite(POW_MOD_1, LOW); pinMode(POW_MOD_2, OUTPUT); digitalWrite(POW_MOD_2, LOW); Serial.begin(9600); Serial.println("OFF"); int pinList[] = GOPRO_ID1; //init all ID1 for (int i = 0;i<=6;i++){ pinMode(pinList[i], INPUT); } pinMode(GOPRO_ID2, OUTPUT); pinMode(GOPRO_ID3, OUTPUT); pinMode(GOPRO_TRIG, OUTPUT); // 1 photo taken // Set output lines to their default state digitalWrite(GOPRO_TRIG, HIGH); digitalWrite(GOPRO_ID2, HIGH); digitalWrite(GOPRO_ID3, LOW); /* Serial.println("press any key once the camera is in photo mode"); while (Serial.available() == 0) {} Serial.read(); */ // ID3 High to say we are going to control the camera, set this low when finished controlling the camera digitalWrite(GOPRO_ID3, HIGH); //May take a photo delay(1500); // Serial.println("Begining to take photos"); } void loop() { int availableData = 0; char lastChar; if (Serial.available()>0){ availableData = Serial.available(); for (int i = 0; i<availableData;i++){ lastChar = Serial.read(); } if (lastChar == 'I'){ GoPro_powerOn(); } else if(lastChar == 'O'){ GoPro_powerOff(); } else if(lastChar == 'T'){ GoPro_takePic(); } else if(lastChar == 'M'){ GoPro_setMode(); } else{ Serial.println("Error"); } } }
~~ODT~~